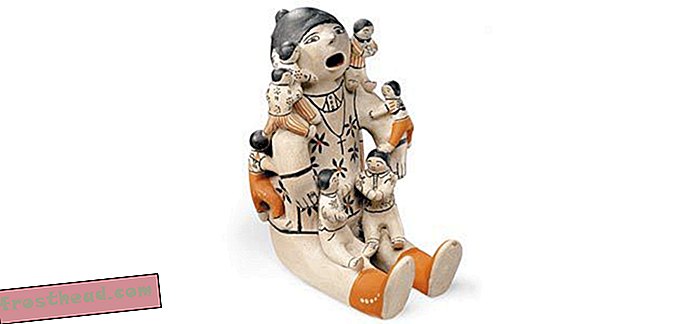
Nový robot běží napříč nerovným povrchem způsobem vytvořeným z ještěrky zebra. Obrázek se svolením Chen Li, Tingnan Zhang, Daniel Goldman
Navrhování robota, který se může snadno pohybovat po volném terénu - řekněme, rover, který měl projít po povrchu Marsu - představuje jedinečnou technickou výzvu: Kola běžně klesají do toho, co inženýři nazývají „tekoucí půdou“ (směsi písku, půdy, bláta a trávy) ).
S ohledem na mnoho biologicky inspirovaných inovací v robotice měl tým vědců z Gruzie Tech nápad - založit design na pouštních tvorech, jako jsou ještěrky zebra, které jsou schopny pohybovat se po uvolněné písčité ploše bez zpomalování. Jejich úsilí jim umožnilo vytvořit toto malé šestnohé zařízení, prezentované v článku publikovaném dnes ve vědě, který může běžet přes zrnitý povrch způsobem, který neuvěřitelně připomíná plaz.
Výzkumný tým, vedený Chen Li, navrhl zařízení poté, co studoval pohyb různých tvorů a matematicky simuloval výkon různých typů nohou (měnící se počet, tvar a délka) v několika odlišných prostředích. Doufají, že jejich výzkum urychlí vývoj pole, které nazvali „terradynamika“ - protože aerodynamika se týká výkonu okřídlených vozidel ve vzduchu, jejich pole bude studovat pohyb legged vozidel na zrnitých površích.
Aby navrhli svého robota, použili tyto simulace k určení přesných délek nohou, rychlostí pohybu a úrovní síly, které by poháněly zařízení přes volný povrch, aniž by je příliš hluboko ponořily. Potom vytiskli různé typy nohou pomocí 3D tiskárny a postavili roboty, aby je otestovali v laboratoři.
Jedním z jejich nejzajímavějších zjištění je, že stejné typy konstrukčních principů platí pro pohyb na různých zrnitých površích, včetně máku, skleněných korálků a přírodního písku. Jejich simulace a experimenty v reálném světě odhalily, že nohy ve tvaru C obecně fungovaly nejlépe, ale že jakýkoli typ končetin ve tvaru luku fungoval relativně dobře, protože při příchodu nohou rozložily hmotnost zařízení na dlouhé (i když úzké) povrchy nohou. v kontaktu se zemí v průběhu kroku.

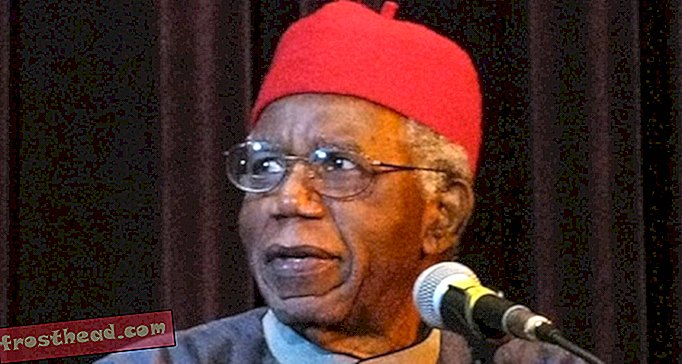
Vědci zjistili, že končetiny ve tvaru C fungují nejlépe pro rychlý pohyb po zrnitých površích, jak u ještěrek, tak u robotů. Přerušovaná, pevná a tečkovaná zobrazení v C a D jsou časná, střední a pozdní pozice nohou během kroku. Šipky označují směry pohybu pro specifické oblasti nohou. Obrázek přes Science / Li et. al.
Aplikace tohoto druhu výzkumu jsou široké: Podle vědců by tento konkrétní robot mohl být vyvinut v užitečné pátrací a záchranné nebo průzkumné zařízení, zatímco principy odvozené z oblasti terradynamiky by mohly být užitečné při navrhování sond pro zkoumání dalších planety v budoucnosti. Mohli by také pomoci biologům lépe porozumět tomu, jak se životní formy zde na Zemi vyvíjely, aby se pohybovaly po povrchu naší planety.